
반응형

1) 조립하기 전에 서보모터 90도에 맞춤
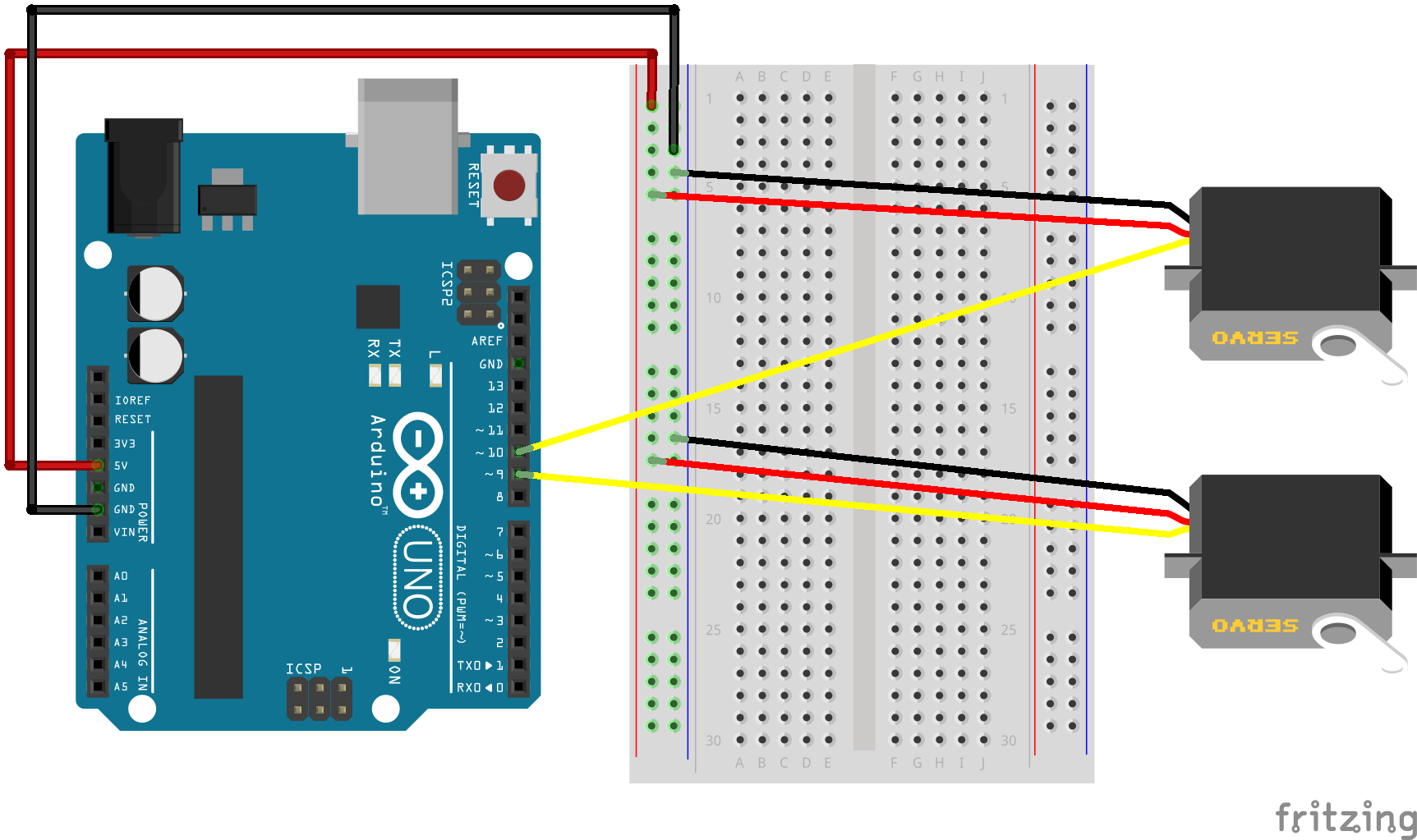
- 서보모터 1 : 9번핀(아래쪽(좌우로 움직임)
- 서보모터 2 : 10번핀(위쪽(상하로 움직임)
#include <Servo.h> // Servo 라이브러리 호출
Servo servo_1; // Servo 객체를 생성합니다. 이 객체를 사용하여 서보모터를 제어
Servo servo_2;
void setup() {
servo_1.attach(9);
servo_2.attach(10);
servo_1.write(90); // 서보모터를 90도 위치로 회전
delay(500);
servo_2.write(90); // 서보모터를 90도 위치로 회전
delay(500);
}
void loop() {
}
2) 브라켓 조립하기
참고 : https://scipia.co.kr/cms/blog/172
플라스틱 PTZ 팬틸트 Pan Tilt 조립방법 | 싸이피아SCIPIA
플라스틱 저가형 팬틸트 조립 방법입니다. 추가로 SG90 9G 서보모터 2개가 필요합니다. 내구성을 생각하신다면 MG90 메탈타입의 서보모터를 사용하십시요. 플라스틱 PTZ 팬틸트 Pan Tilt 조립방법 플
scipia.co.kr
- 받침대 조립 참고 이미지

반응형
'피지컬컴퓨팅 > 아두이노' 카테고리의 다른 글
| #인공지능 AI 활용 - 얼굴인식 트랙킹 (0) | 2025.05.14 |
|---|---|
| #인공지능 AI 활용 - 아두이노와 파이썬 연동하기 (1) | 2024.10.24 |
| ESP32와 DHT22로 온도, 습도 측정하기 (0) | 2024.08.29 |
| ESP32 와 TFT LCD(ILI9341) 연결하기 (0) | 2024.08.20 |
| ESP32 연결 시 포트 인식 못할 때 해결방법 (0) | 2024.08.18 |


